Lecture
Among the electromechanical systems of technological equipment, a significant place is occupied by systems of remote transmission of displacements (both linear and angular). Sensors of the electric machine type include: selsins, magnesins, gear reducers, rotating transformers (including sine-cosine rotating transformers), inductosines, digitizers. Selsin is an electric machine, the stator and rotor of which is drawn from sheet electrical steel. A three-phase (or single-phase winding) is placed on the stator (or rotor), and a single-phase (or three-phase) winding is placed on the rotor (stator). Three-phase winding is performed according to the scheme of a triangle or star. Three-phase windings of the selsyn sensor and selsyn receiver are connected in parallel. Depending on the connection of single-phase windings, there are distinguished switching circuits “indicator” (see Fig. 11.1.) And “transformer” (see Fig. 11.2.).
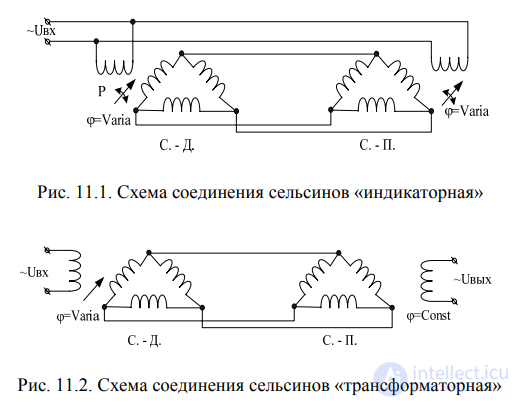
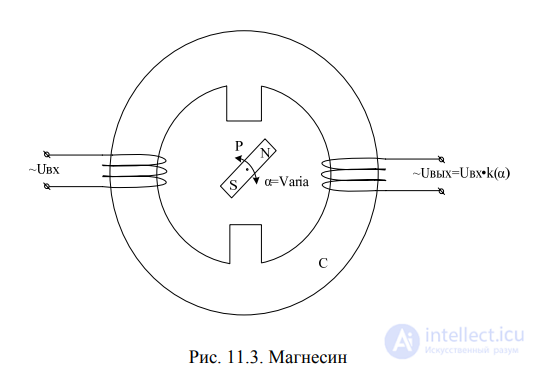
Selsynov's shortcomings - power supply from an alternating current source with a frequency of 100-200 Hz, accuracy of angular measurements - ± 10 ÷ 15 °, allows slippage by n · 120о, Мкр≈n (degrees) in the "indicator" circuit, the presence of a sparking current collector (in the "indicator" scheme). Selsins are used for rough work in positioning systems, for example, antennas in radar, radio navigation, etc. Magnesin is a non-contact sensor of angular displacements. It is used for remote control of the angle of rotation of the shaft with a negligible load on the shaft, for example, in magnetic compasses. The stator is made of soft sheet technical steel, and the rotor is a permanent magnet (hard electrical, pre-magnetized steel). The rotor is mechanically connected to the controlled object. The stator houses two windings, a power winding and an output winding. Magnesin is powered by alternating current with a frequency of 400-500 Hz and is built according to the scheme in Figure 3.
Depending on the rotor material, the quality of the sensor varies (see table 11.1.)
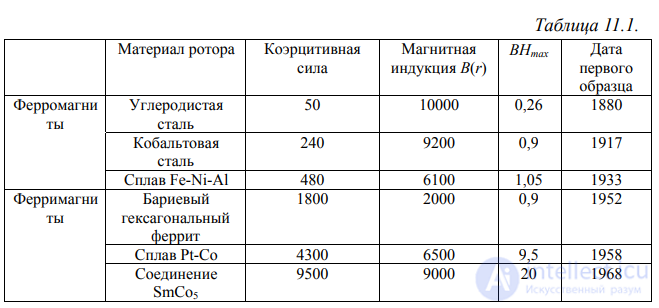
The error of magnesin as an element of the tracking system is approximately 25 °. The action of magnesin reaches its maximum if the state of the rotor magnet corresponds to the point of the demagnetization curve, i.e., the point where Bhmax is maximum, i.e., the maximum magnetic energy per unit volume of the material. The maximum effect is obtained by ferrimagnetic intermetallic compounds of the rare-earth elements Sm (samarium), Nd (neodymium), and Co (cobalt). The rotary transformer (VT) has in the stator and rotor recruited from sheet electrotechnical (soft magnetic) steel, one or two windings are laid in the grooves so that they are mutually perpendicular, and the air gap between the stator and rotor is kept constant
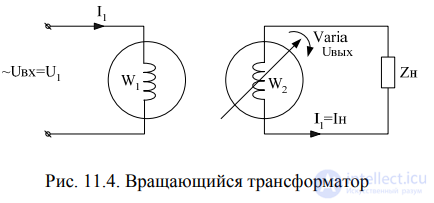
For a VT having one winding each in the stator and rotor, an alternating input voltage Uin is applied to the winding ω1, and a mutual induction EMF variable is induced in the secondary winding ω2 99, the value of which is determined by the location of the windings ω1 and ω2 relative to each other. If the windings are perpendicular, then the EMF is U2 = 0, if the direction of the axes of the magnetic field of the windings ω1 and ω2 coincides, then U2 = Uin = max. At idle, i.e., as Zн → ∞

In the presence of a load (at Zн ≠ ∞), distortion appears in the cosine wave U2, which can be eliminated by primary and secondary symmetrization. For this, two mutually perpendicular (in the electrical sense) windings are laid on the stator and rotor. But such a transformer is called a sine-cosine VT (SC VT) (Fig. 11.5.).
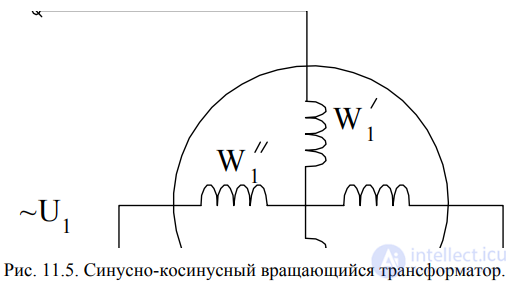
Secondary symmetrization is achieved by the equality of the parameters ω2 ′ = ω2 ″ and Zн1 = Zн2, and primary symmetrization is achieved by the equality of the parameters ω1 ′ = ω2 ″ and the introduction of Zc1. If an alternating voltage U1 is applied to one of the primary windings of the SCWT, then the emf is induced in the windings ω2 ′ and ω2 ″ self-inductions that change when the rotor is rotated according to the law:

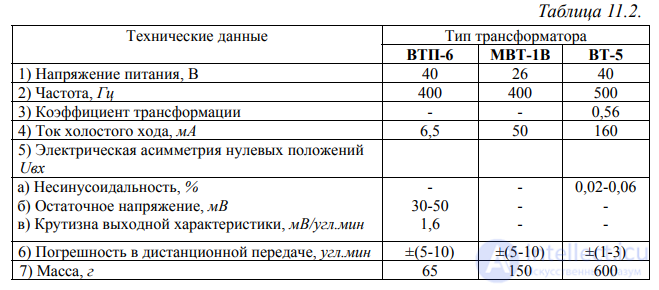
The accuracy of measuring the angular displacements of the SC VT reaches ± (2 ÷ 3) ′, which is achieved by the precision technology of a set of stator and rotor packages, and 100 by the use of various error compensation methods (for example, a circuit with feedback on the quadrature winding of the sensor). Domestic industry produces VT types VTM, VTP, MVT, SKT, BSKT, SKVT and others. The main characteristics of some SK VT are given in table 11.2.
In automation systems, VTs are used not only as sensors, but also as reference elements that measure the angle of mismatch. For this, SCWT are connected according to the circuit shown in Fig. 11.6.
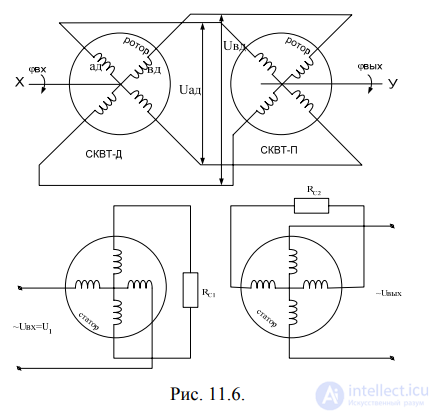
The output voltage Uout is proportional to the error signal
Uout.d described by the system:
The output voltages of the sensor Uad and Uvd are the input voltages of the receiver. The constancy kd and kp and their independence from φ are achieved by bilateral symmetry. Then Uout represents

and for small values of ∆φ:

Structurally, SC VTs are depicted as shown in Fig. 11.7.
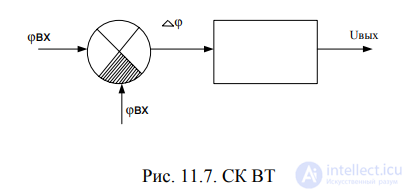
The transfer function of the SKVT is:
 Where
Where 
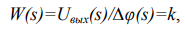
In the dynamic relation, VT and SCWT are inertial units, but for small values of ∆φ, they can be considered as inertialess. Inductosin is a sensor of angular (see Fig. 11.8.) Or linear (see Fig. 11.9.) Displacements, has no galvanic contacts, consists of a rotor and a stator. One winding is placed on the rotor, two are placed on the stator, with a 90o offset (electrical) relative to each other. In it, the magnetic circuit does not 102 have steel and its Rm. The rotor is powered by an alternating input voltage Uin frequency of 10 kHz, Uout is removed from the secondary windings.
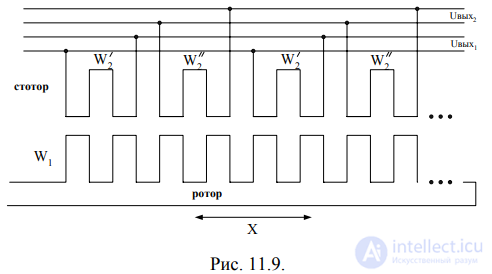
A large number of implicitly expressed pairs of poles, the exact execution of the winding pattern (when manufactured by printed wiring or sputtering), the absence of steel and the losses associated with it, allows us to obtain an accurate sinusoidal dependence of the mutual induction between the stator and the rotor on the rotation angle (α) or displacement (X) . The gap between the stator and the rotor (approximately 0.1 mm) through a wear-resistant varnish that allows sliding. The error of the angular inductosin is a few angular minutes, the error of the linear inductosin is 2–3 μm. The digitizer (encoder) of angular and linear movements is an electric machine in which a slit light source (usually IR) and a multi-cell element are placed in the stator, the rotor is perforated in a binary, binary-decimal code so that the perforation tracks are located against the photocells, and the contents perforations (by the number of punches) reflects binary or decimal decimal information increasing by an order of magnitude. (see fig. 11.10). The rotor is positioned so that rotating and moving it sequentially darkens or illuminates the photocells and, according to the information from the outputs in binary or binary decimal, or in another code, the measurement result is evaluated.
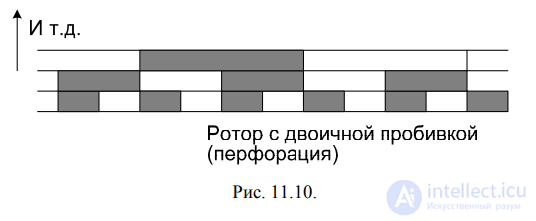
When laser perforation of the rotor, the accuracy of measuring the angle - α≈0.1 ″ - or distance - 0,0001 mm The digitizers produced by the domestic industry are presented in table 11.3:
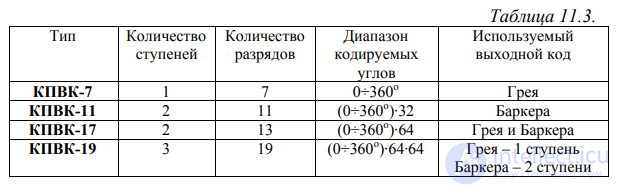
The scope of the digitizers is precision technological equipment (for example, processing centers), and in electronic instrumentation - switching in ICs on a chip.

Comments
To leave a comment
Sensors
Terms: Sensors